O can robot é un robot cuadrúpedo, pertencente a un robot de patas, de aparencia similar a un animal cuadrúpedo, pode camiñar de forma autónoma, con atributos biolóxicos, capaz de camiñar en diferentes contornas xeográficas, realizar unha variedade de movementos complexos e coa axuda de o controlador de movemento de patas, escalando montañas e vadeando a través da auga, cargando pesadas cargas de mercadorías, a través de algúns dos humanos inaccesibles ao límite do medio ambiente. Por iso, o can robot chámase "o robot máis avanzado do mundo para adaptarse ao terreo accidentado".
No interior do can robot flexible e cambiable, o compoñente clave é a perna do motor, as extremidades do can robot e cada articulación precisan accionamento do motor, e este proceso necesita usar o conector de alimentación para realizar esta función, na práctica, as extremidades do can robot. dentro do espazo estreito e compacto, así como aplicacións ao aire libre, presentaron requisitos estritos para o conector, entón que conector de alimentación para poder facelo?
Cales son os requisitos dun can robot para os conectores
O can robot é a industria do robot intelixente nos últimos anos acaba de xurdir nun modelo, na actualidade os nosos produtos no pequeno volume de conectores de alta corrente e rendibles na vantaxe absoluta, polo que os clientes da industria do can robot seleccionaron temporalmente os nosos produtos .
Na actualidade, os clientes da industria do can robot esperan mellorar o produto: o produto debe estar con fibela de bloqueo, porque o can robot dá un salto mortal este tipo de acción no conector de fonte de alimentación ten a demanda de anti-desaloxamento, actualmente, os clientes están a través do proceso de pegado para evitar que o conector se caia. Amase produtos de conectores da serie LC de cuarta xeración, con deseño tipo feixe, para satisfacer as necesidades da industria dos cans robot.
Pequeno tamaño e alta corrente, sen limitación de espazo
O motor da articulación do xeonllo do can do robot necesita máis dun conector de alimentación para conectarse para conducir a súa andaina, e o propio motor ocupa o espazo e as características da perna do can do robot son pequenas, deixando pouco espazo para o conector, os conectores da serie Amass LC teñen un mínimo de 2 cm. menos do tamaño dun nudillo de dedo, axeitado para can robot dentro do límite do espazo de instalación estreito.

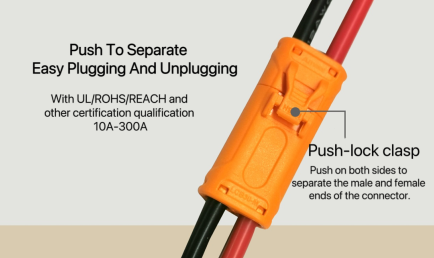
Deseño a presión do feixe, autobloqueo cando se introduce, non hai que preocuparse por caer
No proceso de produción do conector, o deseño do pestillo é un vínculo importante, cando o conector está sometido a forzas externas, o pestillo pode compartir a maioría das forzas externas cedo para garantir que a función anti-desaloxamento do conector. Can robot no movemento de volteretas, ou na montaña accidentada camiñando, o conector interno é moi vulnerable ao ambiente de vibración externa e afrouxamento; e LC serie de conectores de alimentación de fibela tipo feixe no par de inseridos no momento completou a función de autobloqueo, máis propicio para o uso do can robot neste tipo de ambiente de aplicación!
Protección IP65 para aplicacións exteriores
Os cans robot intelixentes son axeitados para patrullas, detección, busca e rescate, entrega e outros ambientes externos. Como todos sabemos, o ambiente exterior, imprevisible, po, choiva e outros factores externos son susceptibles de impedir o funcionamento do can robot intelixente, de xeito que o seu conector interno falla. Os conectores da serie LC de Amass alcanzan o nivel de protección IP65, evitando eficazmente a intrusión de auga e po, para garantir o funcionamento normal do can robot no exterior.
Ademais das vantaxes e aspectos destacados anteriores, os conectores da serie LC tamén teñen as vantaxes de resistencia a altas temperaturas, resistencia a baixas temperaturas, retardador de chama V0, etc., que son axeitados para o uso interno de diferentes dispositivos móbiles intelixentes.
Hora de publicación: 16-mar-2024